

なぜePower-Boardを使用するのか?
ePower-Boardは、eRobロータリーアクチュエータが高速回転および重負荷の下で動作する際の回生ブレーキによる運動エネルギー回収処理に特化した特別なデバイスです。これにより、回生運動エネルギーのフィードバックによって引き起こされる電源電圧のスパイクを避け、バス電圧が高すぎるというエラーレポートやそれによるロータリーアクチュエータのシャットダウンを防ぎます.
ePower-Boardの機能:
ePower-Boardの機能は、回路ループが運動エネルギー回収処理中に、余分なエネルギーを抵抗を通じて放散させることができるため、運動エネルギーのフィードバック過程での電源電圧スパイクを避けることができます。しかし、ePower-Boardを長時間回路に接続しておくことはできず、そうすると継続的により多くの熱が発生し、デバイスの損傷、回路の故障、または不必要な電流消費を引き起こす可能性があります.
ePower-Boardのパラメータ:
サイズ: 75*80*22.5(mm)
重量: 66.5(g)
入力電圧: <50(VDC)
開始時の回生ブレーキ電圧: 51(VDC)
停止時の回生ブレーキ電圧: 50(VDC)
ブレーキ抵抗の電力: 50(W)
ブレーキ抵抗の抵抗: 5(Ω)
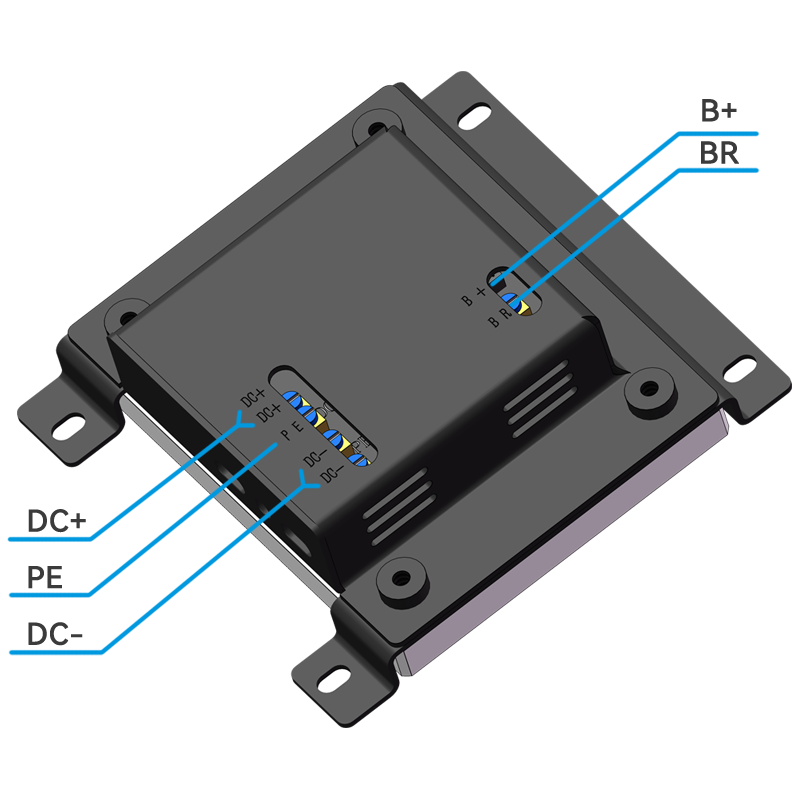
電気インターフェースの定義:
| ピン | 端子記号 | 端子機能 | 端子仕様 |
| 1 | DC+ | 48VDC電源の正極に接続 |
フレーム型,圧着端子, |
| 2 | PE | ハウジングEGNDに接続 | |
| 3 | DC- | 48VDC電源の負極に接続 | |
| 4 | BR | ブレーキ抵抗に接続 | |
| 5 | B+ |

指示:
48V DC電源、ePower-Board、およびロータリーアクチュエータの配線図は、以下の通りです.
ロータリーアクチュエータの電源配線方法については eRobロータリーアクチュエータユーザーマニュアルのセクション7.1「電源配線方法の紹介」を参照してください.
各eRobロータリーアクチュエータモデルの推奨されるDC48V電源、電解コンデンサC, およびブレーキ抵抗Rの仕様は、以下の表を参照してください.

各ロータリーアクチュエータの仕様:
| モデル | DC電源仕様. | ブレーキ抵抗仕様. | 解コンデンサ仕様. |
| eRob70 | 100W、48VDC | 50W、5Ω | 12000μF、60V |
| eRob80 | 200W、48VDC | 50W、5Ω | 12000μF、60V |
| eRob90 | 400W、48VDC | 50W、5Ω | 36000μF、60V |
| eRob110 | 800W、48VDC | 300W、5Ω | 96000μF、60V |
| eRob142 | 1200W、48VDC | 300W、5Ω | 96000μF、60V |
| eRob170 | 1200W、48VDC | 300W、5Ω | 96000μF、60V |
各ロボットアームの推奨仕様:
| アームモデル | DC電源仕様. | ブレーキ抵抗仕様. | 電解コンデンサ仕様. |
| 3kgロボットアーム | 400W、48VDC | 50W、5Ω | 12000μF、60V |
| 5kgロボットアーム | 800W、48VDC | 100W、5Ω | 96000μF、60V |
| 10kgロボットアーム | 1500W、48VDC | 300W、5Ω | 96000μF、60V |
| 20kgロボットアーム | 3000W、48VDC | 300W、5Ω | 96000μF、60V |
注意:ロータリーアクチュエータの電源インターフェースの入力前に空気スイッチが接続されている場合、空気スイッチの後にバッファ電解コンデンサを接続する必要があります(参考仕様:1000uF、100V).












